 ドロ沼くんの⌘マイクロドローンFPV入門
ドロ沼くんの⌘マイクロドローンFPV入門
目次
2018年の12月に開局申請を済ませて以来、いろんなところでマイクロドローンを飛ばしまくっているせいか、最近初心者オススメセットについて聞かれるように。
兵庫の水耕栽培農家さん
クライアント先のスタッフさん
Twitterのフォロワーさん
コメント失礼します。
ズバリ初心者セット教えて下さい。m(_ _)m
まだ息子が小さいですが、後々親子でやりたいと思ってます。そして、息子に負けないように今のうちから練習したいです。どうかよろしくお願いします。— 家庭菜園@井戸掘りwithゆう (@withyry) 2019年4月20日
 ドロ沼くん
ドロ沼くん
ぐふふふ、頼んでないのにみんな勝手にドロ沼へ落ちていくドロ・・・
 カタオカ
カタオカ
マイクロドローンは一般的なドローンと違い難易度が高いです。なので初心者レベルをさらに3段階に分け、それぞれにおすすめな機体をまとめてみました。(カタオカの経験に基づく私見)
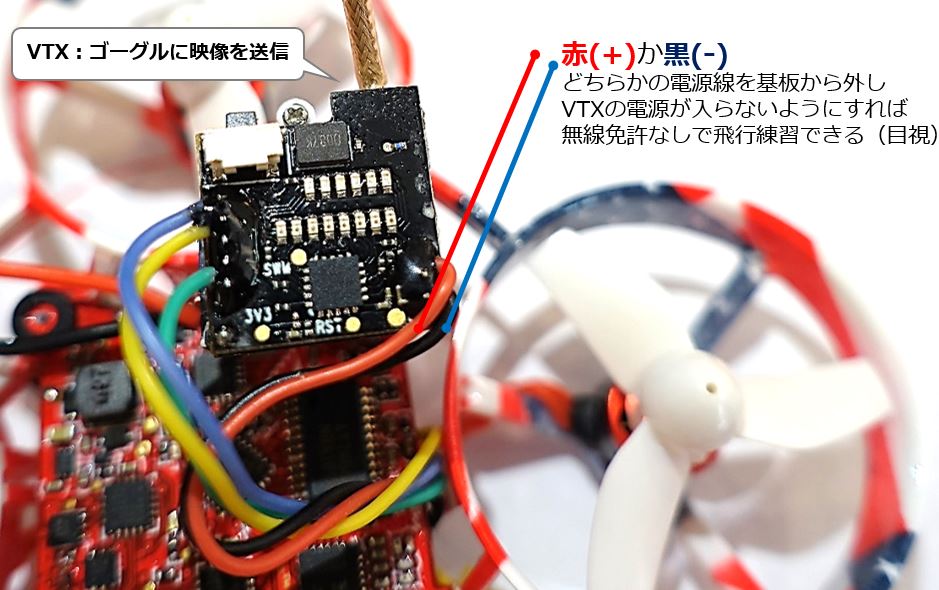
またカメラ付き(FPV飛行)はアマチュア無線4級以上に合格し、開局申請をしないとオフィシャルな場で操縦できないことを予め知っておきましょう。
【レベル1】ドローン触るの全くはじめてな人
HS210(Holy Stone)
全くドローン触ったことがない人が本格マイクロドローンをはじめると、必要知識が多すぎて心が折れます。
なので
- バインド簡単(機体とコントローラーの接続)
- 高度維持機能(自動的にホバリング)
- 予備バッテリがはじめから3個ついてる
- マイクロドローンと同じ形
- 安い!
という特長を備えたHoly StoneのHS210がオススメです。

特に高度維持機能は、ドローン初心者が簡単にホバリングさせるのに必須。ここで躓くと、マイクロドローンって難しいなヤメヨ・・・で終わってしまいます。
カタオカ
2018年大分県でドローン障害物競争レースが開催されたのですが
HS210はその日はじめて触った子供でも難なく操作できるほど安定しています。

お値段も手ごろで予備バッテリー付(全部で3個)で3,750円(安!)なので、これから始める人にはうってつけの機体ですヨ。
【レベル2】トイドローンを操縦したことがある人
EACHINE E010 小型ミニドローン
HS210やTelloなどのトイドローンに触れたことがある人向けなのが「EACHINE E010」
高度維持機能機能がないので、マニュアル操縦のマイクロドローンと同じ環境で練習できます。

お値段はなんと2,300円(爆安)! 壊れたりロストしても財布が痛くならないのが最高の性能です。
 カタオカ
カタオカ
ちなみに私は1万円以上するドローンTelloを風でロストした事あります・・・涙
練習は安い機体から始めましょう。
また、HS210持ってる方はバッテリーが使いまわせるので、余計に予備バッテリ買わずに済みますよ!

JJRC H36 (Eachine E010) 楽しすぎる…HS210付属のバッテリー1本でライト点滅まで5分27秒飛ばせた。HS210付属の3本とH36付属の1本で30分弱遊べる。夜の公園でそよ風に逆らいながらフワフワと飛び回ると、とても癒される。予備を何機も買う人の気持ちが分かった。 @peterminced さんの記事に感謝です
— ジョウジ (@shooter_george) May 22, 2019
さらにレベル3で紹介しているマルチプロトコル送信機、Jumper T8SG V2.0 Plus とバインド可能(プロトコルはMJXq-E010)!中長期的活躍してくれるでしょう。

【レベル3】これからアマチュア無線を受験する人
前述したようにFPV飛行をするためには「アマチュア無線4級以上合格 & 開局申請」が必要です。この手続きを完了させるには最短でも2か月以上かかります。
またレベル3に該当するオススメ品は
- 機体・プロポ・ゴーグルは基本バラ売り
- 中国のECサイト(banggood等)を通じないと買えない
ため納期が2週間~1ヵ月かかります。
カタオカ
なのでマイクロドローン本格的にやろうと思ったら先んじて注文しておくと待ち時間が節減できます◎
またVTXの電源ケーブルを外せば、電波法に違反せず目視飛行で練習できます。
購入先に対する考え方
ここで心理的に大きな障壁になるのが、中国ECサイト(banggood)で新規アカウント作成すること。普段Amazonや楽天に慣れ親しんだ日本人にとって、新たな海外通販サイトに登録するのは苦痛でしかありません。
カタオカ
私も登録の際ものすごい葛藤がありました。ホントに大丈夫なのかと。
そこでbanggoodをよく調べてみると・・・
- 2006年9月創業で歴史長い
- 安全性が高いPaypal決済できる
と数ある中国ECサイトの中でも実績がありました。
また、ほとんどのマイクロドローン製品が揃うので、ここさえ押さえておけば間違いありません。
いまや買いすぎてVIP会員になってしまった・・・

下記リンクより登録すると約1,100円分(10$)の金券がもらえます。はじめて利用される方はご活用ください。
機体本体 Mobula6
Happy Modelのマイクロドローン Mobula6は初心者から上級者まで安心してオススメできる機体。
海外レビューでも非常に評判が良かったので、一気に3台購入しちゃいました!
【参考】実機レビュー:Mobula6が超気持ちよく飛ぶので分解し秘密を解明してみた。
Mobula6 をオススメする理由は下記3点
- ブラシレスモーターで長寿命
- パワー強くて屋外でも飛ばせる
- 高性能バッテリ・プロペラがはじめから付属
- ユーザー数が多くトラブルシューティングが充実している
下記は両者の比較表。Mobura6の方が少し高いですが、パーツグレードを見るとMobula6が断然上!
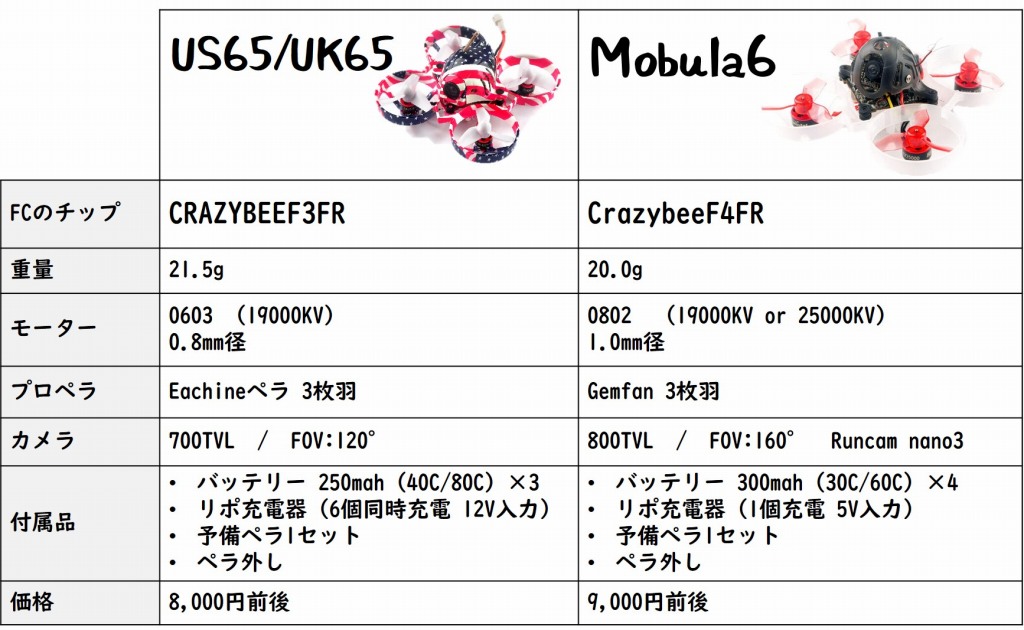
また、FCチップもF4なのでこれからも長く使えます。(F3チップは今後Betaflightサポート対象外となることが決定している)
カスタマイズ要素も多分にあるので中上級者でも楽しめますよ。(75フレームに載せ替え)
レシーバーのプロトコルはFrsky推奨。ソフトウェア書き換えてS-FHSS規格にも対応(Futabaのプロポでもバインド可)できます。
モーターも19000kv/25000kvの2種類が出ていますが、19,000kvの方が飛行時間長く初心者にもオススメです。(私も19,000kvでレースに出てます)

Mobula6の関連備品
以下他にあった方が良い備品情報。日本のAmazonでも価格それほど変わらず短納期で届くので、待つの嫌な方はAmazon調達がオススメです。
①リポバッテリーの充電器
Mobula6にも充電器付属していますが同時複数充電できず非常にショボイ・・・
別途充電器を買ったほうが充電時間を余計に待たず快適に練習できます。
はじめて充電器を買う方におススメなのがUSBタイプ。モバイルバッテリー経由でも充電でき、HV対応なので非常に使い勝手がいいです。
日常はもちろん、電源確保が読めないレース出場時に特に活躍しますよ。
②予備バッテリ
Mobula6にははじめからバッテリが4本付属しています。が、やはり予備バッテリは多く持っていると充電待たずに飛ばせるので、はじめから揃えておくのがオススメ。
ちなみにリポバッテリーは海外通販で買うと納期が1-2か月かかります。
国内Amazonと価格も変わらないので国内調達をおススメします!
何度かbanngoodで注文したことがあるのですが、2カ月以上待たされた上、国境をまたげず2度返送され届きませんでした。
リポバッテリーは扱いデリケートなので仕方ないですね・・・涙
現在私はGNB製のリポバッテリーを愛用。mobula6の場合、標準付属と同じ300mahのタイプがベストです。 (パンチがあって優秀)

③L字型micro USBケーブル
US65/US65 に限らずレベル3に該当するマイクロドローンは、これまでのドローンのように箱出しですぐ飛ばす事ができません。
はじめにPCとマイクロドローン本体を通信可能なmicro USBケーブルでつなぎ、Betaflightというソフトでバインド(無線接続)設定し初めて飛行できるのです。

その際あると便利なのがL字型micro USBケーブル。機体内蔵のジャイロセンサーに水平位置を覚えさせる工程が劇的に楽になります。
カタオカ
ジャイロセンサーはたまに狂うので、初期設定後も再度水平位置を覚えさせることがあります。
また、L字型ケーブルは単眼式ゴーグルや日常的なスマホ充電時も使い勝手がいいので、この機に揃えておくことをオススメします。
▼私は3本セットでお得なコレを使っています。

④対応する系統図
さて忘れちゃいけないのが系統図。これがないと開局申請できません。
私の知る限りでは下記2つの国内ショップが系統図付きで販売してくれています。
もし海外ECサイト経由での調達を希望するなら、日本ドローン無線協会 会長の戸澤洋二さんに相談すれば入手できる可能性があります。必要な方は戸澤洋二さんの運営サイト「アマチュア無線でFPV ドローンレースに参加しよう」にアクセスし、記載されているメールアドレスにて相談してみましょう。
もし対応してくれそうになった場合1,000円で系統図を入手することが可能です。(系統図は本記事では配布していません)
【参考】マイクロドローンの開局申請を世界一分かりやすく解説してみた。
プロポ・送信機 Jumper T8SG V2.0 Plus
マイクロドローン界には多くの種類のプロポがあります。ただ選択肢がありすぎて何買えばいいのか迷います。
カタオカ
で、色々試さないと気になってしまう私はこのようにプロポ沼へ・・・

またプロポ選びを難しくしているのがプロトコル問題。
プロトコルとは簡単に例えるなら言語。日本語で話したら日本語分かる人にしか通じないように
プロポ側(送信機)とドローン(受信機)同士の規格が合ってないとコントロールできないのです。

例えばマイクロドローンの新製品がDSMXにしか対応しておらず、手持ちの送信機がFrskyのものしかなければ、新たにDSMX規格のプロポを買い足す必要があります。
 カタオカ
カタオカ
他にも日本で合法的に使える証「技適マーク」が取得されているか?
操作性や重量・大きさなどの問題が複雑に絡みあって、余計に迷います。
そんな混沌としたプロポ界に2019年突如現れた救世主が「Jumper T8SG Plus V2」。
あらゆる規格に対応できる「マルチプロトコル」を実装している上に「技適マーク」も取得しているため、これ1台あれば合法的にほとんどのマイクロドローンを操縦出来てしまうのです!

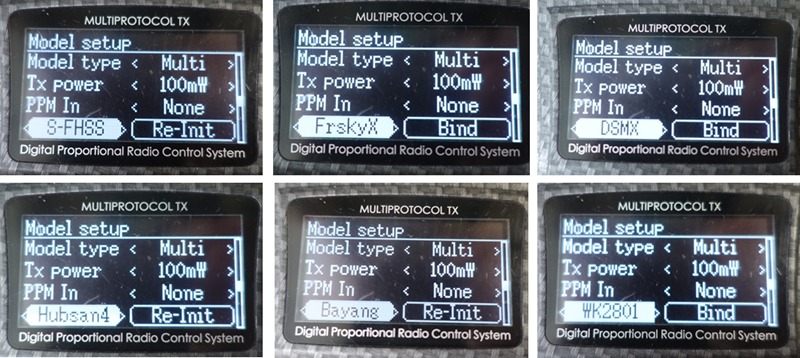
こちらがJumper T8SG Plus V2の設定画面。
S-FHSS・Frskyといったメジャープロトコルはもちろん、トイドローンでも多く採用されているHubsan・Bayang・そしてラジコンヘリでも有名なワルケラまで幅広く対応していることが分かります。詳細な対応一覧表はコチラ
質感・操作性に関しても悪くなく、1台持っておいて決して損ではありません。

Jumper T8SG V2.0 Plusの商品ページ ←モード2を選択すること!
即日欲しい方はAmazonでも購入可能です。(モード2を選んで下さい)
FPVゴーグル FATSHARK Attitude V5
FPVゴーグルは価格がピンキリな上に種類も多くプロポ同様に初心者泣かせなアイテム。私も数千円で買える安い単眼式から6万円もする2眼式まで6つのFPVゴーグルを購入しました。

結論から申し上げると、2019年7月に新発売されたエントリーモデル FATSHARK Attitude V5 がオススメ!

・はじめから受信機・アンテナ付属
・有機ELディスプレイ
・HDOよりも軽い
でお値段なんと3万円!(⇔受信機アンテナなしのHDOが約5万円)
FATSHARK ブランドはリセールバリューも高いので、上級モデル買い替え時にヤフオク・メルカリで高く売れるでしょう。

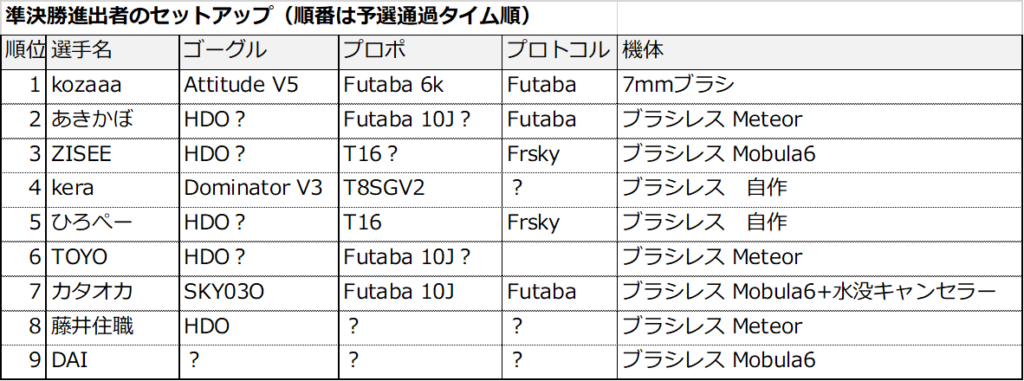
エントリーモデルですが超早い中学生レーサー、kozaaa選手も使用!
安い単眼ゴーグルという選択肢もありますが、レース上位進出者はみな2眼式ゴーグルでした。
単眼ゴーグルはちょっと遅延する感じがあるんですよね・・・。家族や友人に見せる用途ならアリだと思います。
FATSHARK Attitude V5の実機レビュー記事も作成しましたのでご参考まで

まとめ
マイクロドローンはDJIのような空撮ドローンと違い、国内販路や製品情報が十分整っていません。ゆえに中国ECサイトから一発勝負で仕入れては失敗し、また注文し直すという無駄買いループに陥りがち。
これからはじめられる方の無駄買い回避に本記事が参考になれば幸いです。
ドロ沼くん
グフフ、油断してるともっと引きずり込むドロよ・・・
【レベル2】約2,000円
【レベル3】約3~5万円
(機体)
(プロポ)
・Jumper T8SG Plus V2・・・Amazonですぐ欲しい方はコチラ
(ゴーグル)
・FATSHARK Attitude V5 ・・・Amazonですぐ欲しい方はコチラ
今日の一句
”調達を ミスると辛い マイクロ界”
カタオカ
もし不明点・疑問点ありましたらコメント欄にお気軽に投稿ください!


はじめまして。
こちらのサイトを参考にEACHINEのUK65 FRSKYとJUMPERT16を購入したのですがバインド方法がわかりません…
バインド方法が書かれているサイトなどはありますでしょうか?
参考頂きありがとうございます◎
JumperT16でしたかー!
あのプロポは色々出来過ぎちゃう分初心者の方には設定が難しいぽいんですよ涙
近々T16のバインド方をまとめていこうとおもいますのでしばらくお待ち頂ければ、、、
はじめまして。
これからマイクロドローンを始めようと思ってるんですが、
プロポの件でモード2を選ぶ理由はどうしてでしょうか?
コメントありがとうございます。
ドローンの操縦は世界的にみてもモード2が多数派だからです。
例外としてラジコンヘリをされていた方はモード1が多いですね。
今から始められるのであれば汎用性という観点からモード2を選択するのが理にかなっていると思います。
(例:急なトラブルで他の人のプロポを借りることになった場合多数派のモード2の方が安心)
なるほどです^_^
自分は200g以上のファントム とマビック2 を操縦をしてるんですが教えてもらうときにモード1で教えてもらってます(^◇^;)
どうしようか悩み中です。。。
DJI機でもモード2が一般的だと思います。
おそらく教官の方はヘリ出身なのかもしれませんね。
はじめまして。
プロポンの件ですが、なぜモード2を選ぶように推奨しているのですか?
はじめまして。このサイトやいろいろな動画で勉強中の初心者です。
この1ヶ月でHS210Pro → E010で、今まさにレベル2!
とても初歩的な質問ですが教えて下さい。
①国内の多くは2.4Gで免許不要ですが、技適マークが必要。
海外のFPVは5.8Gで免許必要ですが、技適は付いているのですか?
免許があれば技適なし機種でも良いのですか?
①E010とT8SG V2.0 Plusのバインド可能とありますが、
他のプロポでもマルチプロトコルであればよいのですね?
それは基本OSがOPEN-TXと同じ意味ですか?
コメントありがとうございます!
下記ご回答しますね。
①技適のない海外VTXに関するご質問と解釈しました。
技適が無い代わりにJARDやTSSといった第三者機関に保証を受ける形で国内利用可能になります。
詳しくは当ブログ記事の「【ドローンFPV用】開局申請の手続きを世界一分かりやすく解説してみた。」
を御覧ください。
②ハイ、マルチプロトコルと書かれているものならT8SG以外でも可能です。(例 T16など)
ちなみにOPEN-TXとマルチプロトコルは別物です。マルチプロトコルは電波を発する電子部品のことを指しており、それを制御するソフトウェアはOPEN-TXやDeviationといった感じです。
参考
T8SG V2 Plus・・・マルチプロトコル / Deviation
T12・・・マルチプロトコル / Open-TX
T16・・・マルチプロトコル / Open-TX
Jumper JP4IN1 マルチプロトコル送信機モジュール・・・ マルチプロトコル / OSは取り付けるプロポ次第
はじめまして。本サイトを見てドローンとして初めてHS210を購入し、楽しんでいる者です。素晴らしい紹介ありがとうございます。
Mobura6が欲しくなり、banggoodサイトにとんだところそもそも日本は中国からのドローン購入が禁止された(?)為か、買えません。(涙)
同じぐらいおすすめの機体はありますでしょうか?
私のドローンに対する姿勢としては、いずれはいろんな動画を空撮して編集したいといったところですが、Mobura6の動画見て衝撃を受け、レースタイプのモノにもひとまず手を出してみたくなった次第です。
すいません、教えていただきたいことがあります。
US65とT8SGPLUSver2.0を購入し、BETAFLIGHTで設定したのですが、
スロットルのみ動きません。ロール・ピッチ・ヨーは動くのですが・・・
もう2週間ほど格闘しています。
なにかアドバイスをお願いします。
実機をみないと正確にはお答えできないのですが
内容から推察する限り、
左メニュー受信機⇒チャンネルマップ
が正しく設定できてない可能性があります。こちら変更して挙動確認していただけますか?
はじめまして、youtubeでドロ沼さんを知り、このサイトも動画も楽しく拝見させて頂いております。ありがとうございます。
私は、50歳でマイクロドローンに興味を持った初心者です。
以前からドローンに興味を持ち、HITECのX130-Tを1年半前に買いました。ゴーグルを夢見ていましたが、アマチュア無線を取らないまま2~3か月でほとんど使わなくなり、ごく最近、mavic miniを買って、ドローン熱が復活しました。
mavic mini は安定はするものの、操縦する楽しさが少なく、色んなドローンのyoutubeを見て、室内で遊べてクラッシュしてもダメージが少なそうなマイクロドローンに興味を持ちました。
コロナのせいでアマチュア無線の試験実施が未定のようですが、早く取得するつもりです。ドロ沼さんおすすめのmobula6を買おうと思うのですが、ドロ沼さんと同じプロポfutaba 10Jを持っているのでこれを活かすためには、受信機はfrskyではなくS-FHSSを買わなくては使えませんでしょうか。frskyを買って、betafright等、自分で設定はできないでしょうか。おすすめのbanggoodさんにmodula6のS-FHSSが売っていないようなので残念です。国内のお店Glide Pathさん等ではS-FHSSを扱っており(在庫なしで入荷未定)系統図も頂けるようなので、そういうお店でS-FHSSタイプを購入した方が良いでしょうか。
長くなってしまい申し訳ありません。
よろしくお願い申し上げます。
youtubeもご覧いただきありがとうございます!
受信機の件ですが、実は受信機内蔵型タイプの受信機であれば
ベータフライトで frsky⇒S-FHSSに変更可能なのです!
本コメント欄では説明しきれないため、後日youtubeかブログ記事でご紹介できればと思います◎
早速のご返信ありがとうございます。
YouTubeやブログの記載、楽しみに待っています。
マイクロドローンを持って、いつかドロ沼さんにお会いできる日を楽しみにしています。まだドローン仲間は小学生の息子だけなので、友人になれたら幸いです。
はじめまして。ドロ沼さんのHP大変勉強になり、楽しく拝見させてもらってます。ドローンFPVの映像に小学生の頃に観たスターウォーズのシーンが重なり、自分も操縦したい!と決意し色々調べていたところドロ沼さんのHPに出会いました、アラフィフのおっさんです。早速アマ4取ってと思っていたところ、世界中がこの騒ぎ。とりあえずVelociDroneをダウンロードし、おすすめのJumperT8SGを購入しました。実機でレース出場目指して特訓中です。
コメントありがとうございます!弊ブログが参考になって幸いです◎
今ちょうどVelociDroneブームなので良いと思います!T8SGだとUSBでそのままPC接続できますしね。
今後ともよろしくお願いいたします!
はじめまして。
大変分かりやすく参考になるHPで素晴らしいですね!
HS210から始めMobula6を購入しました。プロポはBETAFPVのLiteRadio 2 Radio Transmitter Frskyを持っていますが、バインドできずに困っています。
お分かりになる範囲で教えていただけると、とても助かります。
1.プロポの電源を入れる
2.Mobula6をバッテリーに繋ぐ
赤の点滅
3.プロポのバインドボタンを押す 4.Mobula6のバインドボタンを押す
赤の点灯
この手順でバインド可能でしょうか?
初心者なので教えて頂けると助かります。 よろしくお願いいたします。
コメントありがとうございます◎
レベル3のドローンなのですが、記事中でも書いているように、HS210とは違いスイッチを入れただけではバインドができません。
具体的にはbetaflightというソフトウェアをPCにダウンロードし、マイクロドローンとPCをUSB接続した上で設定を進める必要があります。
ちょっと記事中ではうまく伝えられないため
「betaflight バインド Frsky」
といったキーワードで検索していただけますでしょうか??
またWTWなどオフラインの集まりに行けば解決の緒がつかめますよ!
お世話になります。
いろいろ試してみましたが、どうしてもバインドができません。
首都圏でここに持ち込めば診てもらえるような場所はないでしょうか?
よろしくお願いいたします。
いろいろ調べてたり、教えて頂いてなんとかバインドできました。
ご教授ありがとうございました。
これからも勉強・練習してどっぷりハマりたいと思います。
今後ともHP参考にさせていただきます。
これからもよろしくお願いいたします。
解決したようで良かったデス◎
首都圏ですとWTWという毎週水曜日都内で飛ばしているグループがあります。私もたまに足を運んでいますが、意見交換が活発でおススメです!
https://www.wtw.tokyo/
コメントありがとうございます◎
レベル3のドローンなのですが、記事中でも書いているように、HS210とは違いスイッチを入れただけではバインドができません。
具体的にはbetaflightというソフトウェアをPCにダウンロードし、マイクロドローンとPCをUSB接続した上で設定を進める必要があります。
ちょっと記事中ではうまく伝えられないため
「betaflight バインド Frsky」
といったキーワードで検索していただけますでしょうか??
またWTWなどオフラインの集まりに行けば解決の糸口がつかめますよ!
ご返信ありがとうございます。
もう少し頑張ってみます。
これからもよろしくお願いいたします。
skykataoka さま
お世話になります。
X-Lite Proが手元に届いてOpenTX設定の真っ最中です。
Mobula6とバインドしたいのですがなかなかうまくいきません。
OpenTXは難しいですね。
設定が間違っているのか、バインド方法が違うのか
原因がわからず困っています。
確認すべき項目がありましたら教えてください。
よろしくお願いいたします。
現在の設定内容です。
FM:opentx-xlites
VERS:2.3.9-otx(60e1edc1)
Int.module:ISRM-PRO 1.1.0/2.1.0FCC
Ext.module:OFF
Internal RXF
Mode:ACCST D16 CH1-16
INPUTS:ATER
MIXES:
CH1 Ail
CH2 Ele
CH3 Thr
CH4 Rud
CH5 SC ARM
CH6 SB FM
CH7 SD FLIP
Mobula6 Frsky Receiver
現物がないためハッキリしたことは言えないのですが、書かれている症状から察するに
FC側 BETAFLIGHTの設定とプロポの設定画一致していないことが原因と思われます。
Frskyには2種類ありましてそれぞれ下記に設定する必要があります。
・プロポ Frsky D16⇒BetafligftのReciever項目をFRSKY_X にする
・プロポ Frsky D8⇒BetafligftのReciever項目をFRSKY_D にする
一度試して頂けますか?
また上記内容は付属説明書の Receiver configurationにも記載されていますので合わせて確認いただければと思います◎
skykataokaさん
コメントありがとうございます。
すっかりドローンにはまってしまいました(笑)
BetafligftのReciever項目はFRSKY_Xにしているんですよね。
別のプロポではバインド出来ていて
プロポをx-liteに変更したんですが、
うまくいかず…。
他に思い当たることはありますでしょうか?
よろしくお願いいたします。
なるほどー
となると書かれているようにプロポ側が原因ですね。
x-lite ProはアップグレードされたACCESS というプロトコルを使っているのですが
・外部受信機⇒ファームウェアアップデートで対応可能
・内蔵受信機⇒対応不可
という問題を発売当初けっこう耳にしました。
私は前モデルのX-liteは所持しているのですがproは持っていないため上記問題の経過については申し訳ないのですがキャッチアップできておりません。
ACCESS をキーに色々調べられると解決方法が出てくるかもしれませんね。
初めまして、サイト参考にしています。
数年前までミニヘリコプター、マイクロドローンなどを
飛ばしており最近、再開しました。
このサイトですすめている便利なプロポ、Jumper T8SG V3
を買い YouTubeなどを参考にしてみたのですが
BETAFPV beta65Sとのバインドが何度やっても出来ません。
プロトコル Bayang、最後Bayang→Re-lnitで決定ボタンを押すと
バインド出来たように機体は、点滅するのですが
すぐに「Press ENT tostp 3 seconds left OK」
と表示されBaidされません。
解決方法があれば教えてもらえませんか?
いえいえ、お役に立ててよかったです◎
まずBeta65Sはbeyangプロトコルではありません。
おそらくFrskyかS-FHSSかと思います!(お買上時のデータを確認下さい)
またFrskyとS-FHSSは切替可能です。
詳細は下記動画にて解説しておりますのでよろしければご参照下さい!
https://youtu.be/laWhxVGA0c8
ごめんなさい、すぐに返事をいただけていたんですね。
事情がありチェック出来ませんでした。
また、私の質問が間違っていました
BETA65SでなくBETA65S Lite(Bayang)です。
あとKingKongのTiNY6X(S-FHSS)も持っていて
これも上記の理由でバインド出来ませんでした。
多分、設定中へんなところ触ったのだと思います。
不良品だとは思いませんが
マニアルを見ても元に戻すのは無理だと思い
Amazonで買った商品だったので返品しました。
開封済み箱無しなのでお金が返ってくるは分かりませんが。
お金が返ったらもう一度買ってみます。
はじめまして。YouTubeもよく視聴させて頂いてます。
fpv初心者でskyzone03Oを使用していますが、画面左上にNoCardという表示が出るのですが消す方法をご存知であれば教えて頂けますでしょうか?
初めまして
いつも参考にさせていただいております。
ちなみにUZ85のbetaflightの初期all dumpとか頂けないでしょうか?
いろいろといじっていたら初期値がわからなくなってしまったので
また、skykataokaさんの設定値も教えて頂きたいです。
宜しくお願いします。
PCに残していたものをUPしてみました!
#
# dump all
# version
# Betaflight / CRAZYBEEF4FR (C4FR) 4.0.6 Sep 1 2019 / 00:26:58 (2a64051a2) MSP API: 1.41
# start the command batch
batch start
board_name CRAZYBEEF4FR
manufacturer_id
mcu_id 0036002e3439510337313838
signature
# name
name UZ85
# resources
resource BEEPER 1 C15
resource MOTOR 1 B10
resource MOTOR 2 B06
resource MOTOR 3 B07
resource MOTOR 4 B08
resource MOTOR 5 NONE
resource MOTOR 6 NONE
resource MOTOR 7 NONE
resource MOTOR 8 NONE
resource SERVO 1 NONE
resource SERVO 2 NONE
resource SERVO 3 NONE
resource SERVO 4 NONE
resource SERVO 5 NONE
resource SERVO 6 NONE
resource SERVO 7 NONE
resource SERVO 8 NONE
resource PPM 1 A03
resource PWM 1 A02
resource PWM 2 A09
resource PWM 3 A10
resource PWM 4 NONE
resource PWM 5 NONE
resource PWM 6 NONE
resource PWM 7 NONE
resource PWM 8 NONE
resource LED_STRIP 1 A00
resource SERIAL_TX 1 A09
resource SERIAL_TX 2 A02
resource SERIAL_TX 3 NONE
resource SERIAL_TX 4 NONE
resource SERIAL_TX 5 NONE
resource SERIAL_TX 6 NONE
resource SERIAL_TX 7 NONE
resource SERIAL_TX 8 NONE
resource SERIAL_TX 9 NONE
resource SERIAL_TX 10 NONE
resource SERIAL_TX 11 NONE
resource SERIAL_RX 1 A10
resource SERIAL_RX 2 A03
resource SERIAL_RX 3 NONE
resource SERIAL_RX 4 NONE
resource SERIAL_RX 5 NONE
resource SERIAL_RX 6 NONE
resource SERIAL_RX 7 NONE
resource SERIAL_RX 8 NONE
resource SERIAL_RX 9 NONE
resource SERIAL_RX 10 NONE
resource SERIAL_RX 11 NONE
resource LED 1 C13
resource LED 2 NONE
resource LED 3 NONE
resource RX_BIND 1 NONE
resource RX_BIND_PLUG 1 NONE
resource SPI_SCK 1 A05
resource SPI_SCK 2 B13
resource SPI_SCK 3 B03
resource SPI_MISO 1 A06
resource SPI_MISO 2 B14
resource SPI_MISO 3 B04
resource SPI_MOSI 1 A07
resource SPI_MOSI 2 B15
resource SPI_MOSI 3 B05
resource ESCSERIAL 1 NONE
resource CAMERA_CONTROL 1 NONE
resource ADC_BATT 1 B00
resource ADC_RSSI 1 NONE
resource ADC_CURR 1 B01
resource ADC_EXT 1 NONE
resource PINIO 1 NONE
resource PINIO 2 NONE
resource PINIO 3 NONE
resource PINIO 4 NONE
resource OSD_CS 1 B12
resource RX_SPI_CS 1 A15
resource RX_SPI_EXTI 1 C14
resource RX_SPI_BIND 1 B02
resource RX_SPI_LED 1 B09
resource GYRO_EXTI 1 A01
resource GYRO_EXTI 2 NONE
resource GYRO_CS 1 A04
resource GYRO_CS 2 NONE
# timer
timer A03 AF3
# pin A03: TIM9 CH2 (AF3)
timer B10 AF1
# pin B10: TIM2 CH3 (AF1)
timer B06 AF2
# pin B06: TIM4 CH1 (AF2)
timer B07 AF2
# pin B07: TIM4 CH2 (AF2)
timer B08 AF2
# pin B08: TIM4 CH3 (AF2)
timer A00 AF2
# pin A00: TIM5 CH1 (AF2)
timer A02 AF3
# pin A02: TIM9 CH1 (AF3)
timer A09 AF1
# pin A09: TIM1 CH2 (AF1)
timer A10 AF1
# pin A10: TIM1 CH3 (AF1)
# dma
dma SPI_TX 1 NONE
dma SPI_TX 2 NONE
dma SPI_TX 3 NONE
dma SPI_RX 1 NONE
dma SPI_RX 2 NONE
dma SPI_RX 3 NONE
dma ADC 1 0
# ADC 1: DMA2 Stream 0 Channel 0
dma ADC 2 NONE
dma ADC 3 NONE
dma UART_TX 1 NONE
dma UART_TX 2 NONE
dma UART_TX 3 NONE
dma UART_TX 4 NONE
dma UART_TX 5 NONE
dma UART_TX 6 NONE
dma UART_TX 7 NONE
dma UART_TX 8 NONE
dma UART_RX 1 NONE
dma UART_RX 2 NONE
dma UART_RX 3 NONE
dma UART_RX 4 NONE
dma UART_RX 5 NONE
dma UART_RX 6 NONE
dma UART_RX 7 NONE
dma UART_RX 8 NONE
dma pin A03 NONE
dma pin B10 0
# pin B10: DMA1 Stream 1 Channel 3
dma pin B06 0
# pin B06: DMA1 Stream 0 Channel 2
dma pin B07 0
# pin B07: DMA1 Stream 3 Channel 2
dma pin B08 0
# pin B08: DMA1 Stream 7 Channel 2
dma pin A00 0
# pin A00: DMA1 Stream 2 Channel 6
dma pin A02 NONE
dma pin A09 0
# pin A09: DMA2 Stream 6 Channel 0
dma pin A10 0
# pin A10: DMA2 Stream 6 Channel 0
# mixer
mixer QUADX
mmix reset
# servo
servo 0 1000 2000 1500 100 -1
servo 1 1000 2000 1500 100 -1
servo 2 1000 2000 1500 100 -1
servo 3 1000 2000 1500 100 -1
servo 4 1000 2000 1500 100 -1
servo 5 1000 2000 1500 100 -1
servo 6 1000 2000 1500 100 -1
servo 7 1000 2000 1500 100 -1
# servo mix
smix reset
# feature
feature -RX_PPM
feature -INFLIGHT_ACC_CAL
feature -RX_SERIAL
feature -MOTOR_STOP
feature -SERVO_TILT
feature -SOFTSERIAL
feature -GPS
feature -RANGEFINDER
feature -TELEMETRY
feature -3D
feature -RX_PARALLEL_PWM
feature -RX_MSP
feature -RSSI_ADC
feature -LED_STRIP
feature -DISPLAY
feature -OSD
feature -CHANNEL_FORWARDING
feature -TRANSPONDER
feature -AIRMODE
feature -RX_SPI
feature -SOFTSPI
feature -ESC_SENSOR
feature -ANTI_GRAVITY
feature -DYNAMIC_FILTER
feature RX_SERIAL
feature OSD
feature ANTI_GRAVITY
feature DYNAMIC_FILTER
# beeper
beeper GYRO_CALIBRATED
beeper RX_LOST
beeper RX_LOST_LANDING
beeper DISARMING
beeper ARMING
beeper ARMING_GPS_FIX
beeper ARMING_GPS_NO_FIX
beeper BAT_CRIT_LOW
beeper BAT_LOW
beeper GPS_STATUS
beeper RX_SET
beeper ACC_CALIBRATION
beeper ACC_CALIBRATION_FAIL
beeper READY_BEEP
beeper MULTI_BEEPS
beeper DISARM_REPEAT
beeper ARMED
beeper SYSTEM_INIT
beeper ON_USB
beeper BLACKBOX_ERASE
beeper CRASH_FLIP
beeper CAM_CONNECTION_OPEN
beeper CAM_CONNECTION_CLOSE
beeper RC_SMOOTHING_INIT_FAIL
# beacon
beacon RX_LOST
beacon RX_SET
# map
map AETR1234
# serial
serial 20 1 115200 57600 0 115200
serial 0 64 115200 57600 0 115200
serial 1 2048 115200 57600 0 115200
# led
led 0 0,0::C:0
led 1 0,0::C:0
led 2 0,0::C:0
led 3 0,0::C:0
led 4 0,0::C:0
led 5 0,0::C:0
led 6 0,0::C:0
led 7 0,0::C:0
led 8 0,0::C:0
led 9 0,0::C:0
led 10 0,0::C:0
led 11 0,0::C:0
led 12 0,0::C:0
led 13 0,0::C:0
led 14 0,0::C:0
led 15 0,0::C:0
led 16 0,0::C:0
led 17 0,0::C:0
led 18 0,0::C:0
led 19 0,0::C:0
led 20 0,0::C:0
led 21 0,0::C:0
led 22 0,0::C:0
led 23 0,0::C:0
led 24 0,0::C:0
led 25 0,0::C:0
led 26 0,0::C:0
led 27 0,0::C:0
led 28 0,0::C:0
led 29 0,0::C:0
led 30 0,0::C:0
led 31 0,0::C:0
# color
color 0 0,0,0
color 1 0,255,255
color 2 0,0,255
color 3 30,0,255
color 4 60,0,255
color 5 90,0,255
color 6 120,0,255
color 7 150,0,255
color 8 180,0,255
color 9 210,0,255
color 10 240,0,255
color 11 270,0,255
color 12 300,0,255
color 13 330,0,255
color 14 0,0,0
color 15 0,0,0
# mode_color
mode_color 0 0 1
mode_color 0 1 11
mode_color 0 2 2
mode_color 0 3 13
mode_color 0 4 10
mode_color 0 5 3
mode_color 1 0 5
mode_color 1 1 11
mode_color 1 2 3
mode_color 1 3 13
mode_color 1 4 10
mode_color 1 5 3
mode_color 2 0 10
mode_color 2 1 11
mode_color 2 2 4
mode_color 2 3 13
mode_color 2 4 10
mode_color 2 5 3
mode_color 3 0 8
mode_color 3 1 11
mode_color 3 2 4
mode_color 3 3 13
mode_color 3 4 10
mode_color 3 5 3
mode_color 4 0 7
mode_color 4 1 11
mode_color 4 2 3
mode_color 4 3 13
mode_color 4 4 10
mode_color 4 5 3
mode_color 5 0 9
mode_color 5 1 11
mode_color 5 2 2
mode_color 5 3 13
mode_color 5 4 10
mode_color 5 5 3
mode_color 6 0 6
mode_color 6 1 10
mode_color 6 2 1
mode_color 6 3 0
mode_color 6 4 0
mode_color 6 5 2
mode_color 6 6 3
mode_color 6 7 6
mode_color 6 8 0
mode_color 6 9 0
mode_color 6 10 0
mode_color 7 0 3
# aux
aux 0 0 3 1800 2100 0 0
aux 1 1 0 900 1200 0 0
aux 2 2 0 1300 1700 0 0
aux 3 28 1 1400 2100 0 0
aux 4 35 2 1800 2100 0 0
aux 5 0 0 900 900 0 0
aux 6 0 0 900 900 0 0
aux 7 0 0 900 900 0 0
aux 8 0 0 900 900 0 0
aux 9 0 0 900 900 0 0
aux 10 0 0 900 900 0 0
aux 11 0 0 900 900 0 0
aux 12 0 0 900 900 0 0
aux 13 0 0 900 900 0 0
aux 14 0 0 900 900 0 0
aux 15 0 0 900 900 0 0
aux 16 0 0 900 900 0 0
aux 17 0 0 900 900 0 0
aux 18 0 0 900 900 0 0
aux 19 0 0 900 900 0 0
# adjrange
adjrange 0 0 1 900 1200 12 1 0 0
adjrange 1 1 1 1200 1800 12 1 0 0
adjrange 2 2 1 1800 2100 12 1 0 0
adjrange 3 0 0 900 900 0 0 0 0
adjrange 4 0 0 900 900 0 0 0 0
adjrange 5 0 0 900 900 0 0 0 0
adjrange 6 0 0 900 900 0 0 0 0
adjrange 7 0 0 900 900 0 0 0 0
adjrange 8 0 0 900 900 0 0 0 0
adjrange 9 0 0 900 900 0 0 0 0
adjrange 10 0 0 900 900 0 0 0 0
adjrange 11 0 0 900 900 0 0 0 0
adjrange 12 0 0 900 900 0 0 0 0
adjrange 13 0 0 900 900 0 0 0 0
adjrange 14 0 0 900 900 0 0 0 0
adjrange 15 0 0 900 900 0 0 0 0
adjrange 16 0 0 900 900 0 0 0 0
adjrange 17 0 0 900 900 0 0 0 0
adjrange 18 0 0 900 900 0 0 0 0
adjrange 19 0 0 900 900 0 0 0 0
adjrange 20 0 0 900 900 0 0 0 0
adjrange 21 0 0 900 900 0 0 0 0
adjrange 22 0 0 900 900 0 0 0 0
adjrange 23 0 0 900 900 0 0 0 0
adjrange 24 0 0 900 900 0 0 0 0
adjrange 25 0 0 900 900 0 0 0 0
adjrange 26 0 0 900 900 0 0 0 0
adjrange 27 0 0 900 900 0 0 0 0
adjrange 28 0 0 900 900 0 0 0 0
adjrange 29 0 0 900 900 0 0 0 0
# rxrange
rxrange 0 1000 2000
rxrange 1 1000 2000
rxrange 2 1000 2000
rxrange 3 1000 2000
# vtx
vtx 0 0 0 0 900 900
vtx 1 0 0 0 900 900
vtx 2 0 0 0 900 900
vtx 3 0 0 0 900 900
vtx 4 0 0 0 900 900
vtx 5 0 0 0 900 900
vtx 6 0 0 0 900 900
vtx 7 0 0 0 900 900
vtx 8 0 0 0 900 900
vtx 9 0 0 0 900 900
# rxfail
rxfail 0 a
rxfail 1 a
rxfail 2 a
rxfail 3 a
rxfail 4 h
rxfail 5 h
rxfail 6 h
rxfail 7 h
rxfail 8 h
rxfail 9 h
rxfail 10 h
rxfail 11 h
rxfail 12 h
rxfail 13 h
rxfail 14 h
rxfail 15 h
rxfail 16 h
rxfail 17 h
# display_name
display_name -
# master
set gyro_hardware_lpf = NORMAL
set gyro_sync_denom = 1
set gyro_lowpass_type = PT1
set gyro_lowpass_hz = 100
set gyro_lowpass2_type = BIQUAD
set gyro_lowpass2_hz = 0
set gyro_notch1_hz = 0
set gyro_notch1_cutoff = 0
set gyro_notch2_hz = 0
set gyro_notch2_cutoff = 0
set gyro_calib_duration = 125
set gyro_calib_noise_limit = 48
set gyro_offset_yaw = 0
set gyro_overflow_detect = ALL
set yaw_spin_recovery = ON
set yaw_spin_threshold = 1950
set gyro_to_use = FIRST
set dyn_notch_range = AUTO
set dyn_notch_width_percent = 8
set dyn_notch_q = 120
set dyn_notch_min_hz = 150
set dyn_lpf_gyro_min_hz = 150
set dyn_lpf_gyro_max_hz = 450
set gyro_filter_debug_axis = ROLL
set acc_hardware = AUTO
set acc_lpf_hz = 10
set acc_trim_pitch = 0
set acc_trim_roll = 0
set acc_calibration = -115,-61,-38
set mid_rc = 1500
set min_check = 1050
set max_check = 1900
set rssi_channel = 0
set rssi_src_frame_errors = OFF
set rssi_scale = 100
set rssi_offset = 0
set rssi_invert = OFF
set rc_interp = AUTO
set rc_interp_ch = RPYT
set rc_interp_int = 19
set rc_smoothing_type = FILTER
set rc_smoothing_input_hz = 0
set rc_smoothing_derivative_hz = 0
set rc_smoothing_debug_axis = ROLL
set rc_smoothing_input_type = BIQUAD
set rc_smoothing_derivative_type = BIQUAD
set rc_smoothing_auto_smoothness = 10
set fpv_mix_degrees = 0
set max_aux_channels = 14
set serialrx_provider = SBUS
set serialrx_inverted = OFF
set spektrum_sat_bind = 0
set spektrum_sat_bind_autoreset = ON
set airmode_start_throttle_percent = 32
set rx_min_usec = 885
set rx_max_usec = 2115
set serialrx_halfduplex = OFF
set rx_spi_protocol = SFHSS
set rx_spi_bus = 3
set rx_spi_led_inversion = OFF
set adc_device = 1
set adc_vrefint_calibration = 0
set adc_tempsensor_calibration30 = 0
set adc_tempsensor_calibration110 = 0
set input_filtering_mode = OFF
set blackbox_p_ratio = 32
set blackbox_device = SERIAL
set blackbox_record_acc = ON
set blackbox_mode = NORMAL
set min_throttle = 1070
set max_throttle = 2000
set min_command = 1000
set dshot_idle_value = 1000
set dshot_burst = OFF
set dshot_bidir = OFF
set use_unsynced_pwm = OFF
set motor_pwm_protocol = DSHOT300
set motor_pwm_rate = 480
set motor_pwm_inversion = OFF
set motor_poles = 14
set thr_corr_value = 0
set thr_corr_angle = 800
set failsafe_delay = 4
set failsafe_off_delay = 10
set failsafe_throttle = 1000
set failsafe_switch_mode = STAGE1
set failsafe_throttle_low_delay = 100
set failsafe_procedure = DROP
set align_board_roll = 0
set align_board_pitch = 0
set align_board_yaw = 0
set gimbal_mode = NORMAL
set bat_capacity = 0
set vbat_max_cell_voltage = 430
set vbat_full_cell_voltage = 410
set vbat_min_cell_voltage = 330
set vbat_warning_cell_voltage = 350
set vbat_hysteresis = 1
set current_meter = ADC
set battery_meter = ADC
set vbat_detect_cell_voltage = 30
set use_vbat_alerts = ON
set use_cbat_alerts = OFF
set cbat_alert_percent = 10
set vbat_cutoff_percent = 100
set force_battery_cell_count = 0
set vbat_lpf_period = 30
set ibat_lpf_period = 10
set vbat_scale = 110
set vbat_divider = 10
set vbat_multiplier = 1
set ibata_scale = 1175
set ibata_offset = 0
set ibatv_scale = 0
set ibatv_offset = 0
set beeper_inversion = ON
set beeper_od = OFF
set beeper_frequency = 0
set beeper_dshot_beacon_tone = 1
set yaw_motors_reversed = ON
set crashflip_motor_percent = 0
set 3d_deadband_low = 1406
set 3d_deadband_high = 1514
set 3d_neutral = 1460
set 3d_deadband_throttle = 50
set 3d_limit_low = 1000
set 3d_limit_high = 2000
set 3d_switched_mode = OFF
set servo_center_pulse = 1500
set servo_pwm_rate = 50
set servo_lowpass_hz = 0
set tri_unarmed_servo = ON
set channel_forwarding_start = 4
set reboot_character = 82
set serial_update_rate_hz = 100
set imu_dcm_kp = 2500
set imu_dcm_ki = 0
set small_angle = 180
set auto_disarm_delay = 5
set gyro_cal_on_first_arm = OFF
set gps_provider = NMEA
set gps_sbas_mode = AUTO
set gps_auto_config = ON
set gps_auto_baud = OFF
set gps_ublox_use_galileo = OFF
set gps_set_home_point_once = OFF
set gps_rescue_angle = 32
set gps_rescue_initial_alt = 50
set gps_rescue_descent_dist = 200
set gps_rescue_ground_speed = 2000
set gps_rescue_throttle_p = 150
set gps_rescue_throttle_i = 20
set gps_rescue_throttle_d = 50
set gps_rescue_velocity_p = 80
set gps_rescue_velocity_i = 20
set gps_rescue_velocity_d = 15
set gps_rescue_yaw_p = 40
set gps_rescue_throttle_min = 1200
set gps_rescue_throttle_max = 1600
set gps_rescue_throttle_hover = 1280
set gps_rescue_sanity_checks = RESCUE_SANITY_ON
set gps_rescue_min_sats = 8
set gps_rescue_min_dth = 100
set gps_rescue_allow_arming_without_fix = OFF
set deadband = 1
set yaw_deadband = 1
set yaw_control_reversed = OFF
set pid_process_denom = 1
set runaway_takeoff_prevention = ON
set runaway_takeoff_deactivate_delay = 500
set runaway_takeoff_deactivate_throttle_percent = 25
set thrust_linear = 0
set transient_throttle_limit = 15
set tlm_inverted = OFF
set tlm_halfduplex = ON
set frsky_default_lat = 0
set frsky_default_long = 0
set frsky_gps_format = 0
set frsky_unit = IMPERIAL
set frsky_vfas_precision = 0
set hott_alarm_int = 5
set pid_in_tlm = OFF
set report_cell_voltage = OFF
set ibus_sensor = 1,2,3,0,0,0,0,0,0,0,0,0,0,0,0
set mavlink_mah_as_heading_divisor = 0
set telemetry_disabled_voltage = OFF
set telemetry_disabled_current = OFF
set telemetry_disabled_fuel = OFF
set telemetry_disabled_mode = OFF
set telemetry_disabled_acc_x = OFF
set telemetry_disabled_acc_y = OFF
set telemetry_disabled_acc_z = OFF
set telemetry_disabled_pitch = OFF
set telemetry_disabled_roll = OFF
set telemetry_disabled_heading = OFF
set telemetry_disabled_altitude = OFF
set telemetry_disabled_vario = OFF
set telemetry_disabled_lat_long = OFF
set telemetry_disabled_ground_speed = OFF
set telemetry_disabled_distance = OFF
set telemetry_disabled_esc_current = ON
set telemetry_disabled_esc_voltage = ON
set telemetry_disabled_esc_rpm = ON
set telemetry_disabled_esc_temperature = ON
set telemetry_disabled_temperature = OFF
set ledstrip_visual_beeper = OFF
set ledstrip_visual_beeper_color = WHITE
set ledstrip_grb_rgb = GRB
set ledstrip_profile = STATUS
set ledstrip_race_color = ORANGE
set ledstrip_beacon_color = WHITE
set ledstrip_beacon_period_ms = 500
set ledstrip_beacon_percent = 50
set ledstrip_beacon_armed_only = OFF
set osd_units = METRIC
set osd_warn_arming_disable = ON
set osd_warn_batt_not_full = OFF
set osd_warn_batt_warning = OFF
set osd_warn_batt_critical = ON
set osd_warn_visual_beeper = ON
set osd_warn_crash_flip = ON
set osd_warn_esc_fail = OFF
set osd_warn_core_temp = OFF
set osd_warn_rc_smoothing = ON
set osd_warn_fail_safe = ON
set osd_warn_launch_control = ON
set osd_warn_no_gps_rescue = ON
set osd_warn_gps_rescue_disabled = ON
set osd_rssi_alarm = 20
set osd_cap_alarm = 2200
set osd_alt_alarm = 100
set osd_esc_temp_alarm = -128
set osd_esc_rpm_alarm = -1
set osd_esc_current_alarm = -1
set osd_core_temp_alarm = 70
set osd_ah_max_pit = 20
set osd_ah_max_rol = 40
set osd_ah_invert = OFF
set osd_tim1 = 2560
set osd_tim2 = 2561
set osd_vbat_pos = 2400
set osd_rssi_pos = 2362
set osd_link_quality_pos = 234
set osd_tim_1_pos = 234
set osd_tim_2_pos = 2423
set osd_remaining_time_estimate_pos = 234
set osd_flymode_pos = 2457
set osd_anti_gravity_pos = 234
set osd_g_force_pos = 234
set osd_throttle_pos = 2392
set osd_vtx_channel_pos = 234
set osd_crosshairs_pos = 2253
set osd_ah_sbar_pos = 206
set osd_ah_pos = 78
set osd_current_pos = 2336
set osd_mah_drawn_pos = 2368
set osd_motor_diag_pos = 234
set osd_craft_name_pos = 2443
set osd_display_name_pos = 234
set osd_gps_speed_pos = 234
set osd_gps_lon_pos = 234
set osd_gps_lat_pos = 234
set osd_gps_sats_pos = 234
set osd_home_dir_pos = 234
set osd_home_dist_pos = 234
set osd_flight_dist_pos = 234
set osd_compass_bar_pos = 234
set osd_altitude_pos = 234
set osd_pid_roll_pos = 234
set osd_pid_pitch_pos = 234
set osd_pid_yaw_pos = 234
set osd_debug_pos = 234
set osd_power_pos = 234
set osd_pidrate_profile_pos = 234
set osd_warnings_pos = 2345
set osd_avg_cell_voltage_pos = 353
set osd_pit_ang_pos = 234
set osd_rol_ang_pos = 234
set osd_battery_usage_pos = 234
set osd_disarmed_pos = 2314
set osd_nheading_pos = 234
set osd_esc_tmp_pos = 234
set osd_esc_rpm_pos = 234
set osd_esc_rpm_freq_pos = 234
set osd_rtc_date_time_pos = 234
set osd_adjustment_range_pos = 234
set osd_flip_arrow_pos = 234
set osd_core_temp_pos = 234
set osd_log_status_pos = 234
set osd_stick_overlay_left_pos = 234
set osd_stick_overlay_right_pos = 234
set osd_stick_overlay_radio_mode = 2
set osd_stat_rtc_date_time = OFF
set osd_stat_tim_1 = ON
set osd_stat_tim_2 = ON
set osd_stat_max_spd = OFF
set osd_stat_max_dist = OFF
set osd_stat_min_batt = ON
set osd_stat_endbatt = OFF
set osd_stat_battery = ON
set osd_stat_min_rssi = ON
set osd_stat_max_curr = ON
set osd_stat_used_mah = ON
set osd_stat_max_alt = OFF
set osd_stat_bbox = OFF
set osd_stat_bb_no = OFF
set osd_stat_max_g_force = OFF
set osd_stat_max_esc_temp = OFF
set osd_stat_max_esc_rpm = OFF
set osd_stat_min_link_quality = OFF
set osd_stat_flight_dist = OFF
set osd_stat_max_fft = OFF
set osd_profile = 1
set system_hse_mhz = 8
set task_statistics = ON
set debug_mode = NONE
set rate_6pos_switch = OFF
set cpu_overclock = OFF
set pwr_on_arm_grace = 5
set scheduler_optimize_rate = OFF
set vtx_band = 4
set vtx_channel = 1
set vtx_power = 1
set vtx_low_power_disarm = OFF
set vtx_freq = 5740
set vtx_pit_mode_freq = 0
set vtx_halfduplex = ON
set vcd_video_system = NTSC
set vcd_h_offset = 0
set vcd_v_offset = 0
set max7456_clock = DEFAULT
set max7456_spi_bus = 2
set max7456_preinit_opu = OFF
set displayport_msp_col_adjust = 0
set displayport_msp_row_adjust = 0
set displayport_max7456_col_adjust = 0
set displayport_max7456_row_adjust = 0
set displayport_max7456_inv = OFF
set displayport_max7456_blk = 0
set displayport_max7456_wht = 2
set esc_sensor_halfduplex = OFF
set esc_sensor_current_offset = 0
set frsky_spi_autobind = OFF
set frsky_spi_tx_id = 210,163
set frsky_spi_offset = 28
set frsky_spi_bind_hop_data = 2,85,168,16,99,182,30,113,196,44,127,210,58,141,224,72,155,3,86,169,17,100,183,31,114,197,45,128,211,59,142,225,73,156,4,87,170,18,101,184,32,115,198,46,129,212,60,0,0,0
set frsky_x_rx_num = 0
set frsky_spi_a1_source = VBAT
set cc2500_spi_chip_detect = ON
set led_inversion = 0
set camera_control_mode = HARDWARE_PWM
set camera_control_ref_voltage = 330
set camera_control_key_delay = 180
set camera_control_internal_resistance = 470
set camera_control_inverted = OFF
set pinio_config = 1,1,1,1
set pinio_box = 255,255,255,255
set usb_hid_cdc = OFF
set rcdevice_init_dev_attempts = 6
set rcdevice_init_dev_attempt_interval = 1000
set rcdevice_protocol_version = 0
set rcdevice_feature = 0
set gyro_1_bustype = SPI
set gyro_1_spibus = 1
set gyro_1_i2cBus = 0
set gyro_1_i2c_address = 0
set gyro_1_sensor_align = CW90
set gyro_2_bustype = SPI
set gyro_2_spibus = 0
set gyro_2_i2cBus = 0
set gyro_2_i2c_address = 0
set gyro_2_sensor_align = DEFAULT
set timezone_offset_minutes = 0
set gyro_rpm_notch_harmonics = 3
set gyro_rpm_notch_q = 500
set gyro_rpm_notch_min = 100
set dterm_rpm_notch_harmonics = 0
set dterm_rpm_notch_q = 500
set dterm_rpm_notch_min = 100
set rpm_notch_lpf = 150
# profile
profile 0
set dyn_lpf_dterm_min_hz = 150
set dyn_lpf_dterm_max_hz = 250
set dterm_lowpass_type = PT1
set dterm_lowpass_hz = 100
set dterm_lowpass2_type = BIQUAD
set dterm_lowpass2_hz = 0
set dterm_notch_hz = 0
set dterm_notch_cutoff = 0
set vbat_pid_gain = OFF
set pid_at_min_throttle = ON
set anti_gravity_mode = SMOOTH
set anti_gravity_threshold = 250
set anti_gravity_gain = 5000
set feedforward_transition = 21
set acc_limit_yaw = 100
set acc_limit = 0
set crash_dthreshold = 50
set crash_gthreshold = 400
set crash_setpoint_threshold = 350
set crash_time = 500
set crash_delay = 0
set crash_recovery_angle = 10
set crash_recovery_rate = 100
set crash_limit_yaw = 200
set crash_recovery = OFF
set iterm_rotation = ON
set smart_feedforward = OFF
set iterm_relax = RPY
set iterm_relax_type = GYRO
set iterm_relax_cutoff = 11
set iterm_windup = 40
set iterm_limit = 150
set pidsum_limit = 500
set pidsum_limit_yaw = 400
set yaw_lowpass_hz = 0
set throttle_boost = 5
set throttle_boost_cutoff = 15
set acro_trainer_angle_limit = 20
set acro_trainer_lookahead_ms = 50
set acro_trainer_debug_axis = ROLL
set acro_trainer_gain = 75
set p_pitch = 80
set i_pitch = 100
set d_pitch = 85
set f_pitch = 140
set p_roll = 85
set i_roll = 100
set d_roll = 85
set f_roll = 140
set p_yaw = 120
set i_yaw = 100
set d_yaw = 0
set f_yaw = 140
set angle_level_strength = 90
set horizon_level_strength = 50
set horizon_transition = 75
set level_limit = 80
set horizon_tilt_effect = 75
set horizon_tilt_expert_mode = OFF
set abs_control_gain = 0
set abs_control_limit = 90
set abs_control_error_limit = 20
set abs_control_cutoff = 11
set use_integrated_yaw = OFF
set integrated_yaw_relax = 200
set d_min_roll = 20
set d_min_pitch = 22
set d_min_yaw = 0
set d_min_boost_gain = 27
set d_min_advance = 20
set motor_output_limit = 100
set auto_profile_cell_count = 0
set launch_control_mode = NORMAL
set launch_trigger_allow_reset = ON
set launch_trigger_throttle_percent = 20
set launch_angle_limit = 0
set launch_control_gain = 40
# profile
profile 1
set dyn_lpf_dterm_min_hz = 150
set dyn_lpf_dterm_max_hz = 250
set dterm_lowpass_type = PT1
set dterm_lowpass_hz = 100
set dterm_lowpass2_type = PT1
set dterm_lowpass2_hz = 200
set dterm_notch_hz = 0
set dterm_notch_cutoff = 0
set vbat_pid_gain = OFF
set pid_at_min_throttle = ON
set anti_gravity_mode = SMOOTH
set anti_gravity_threshold = 250
set anti_gravity_gain = 5000
set feedforward_transition = 0
set acc_limit_yaw = 100
set acc_limit = 0
set crash_dthreshold = 50
set crash_gthreshold = 400
set crash_setpoint_threshold = 350
set crash_time = 500
set crash_delay = 0
set crash_recovery_angle = 10
set crash_recovery_rate = 100
set crash_limit_yaw = 200
set crash_recovery = OFF
set iterm_rotation = ON
set smart_feedforward = OFF
set iterm_relax = OFF
set iterm_relax_type = GYRO
set iterm_relax_cutoff = 11
set iterm_windup = 40
set iterm_limit = 150
set pidsum_limit = 500
set pidsum_limit_yaw = 400
set yaw_lowpass_hz = 0
set throttle_boost = 5
set throttle_boost_cutoff = 15
set acro_trainer_angle_limit = 20
set acro_trainer_lookahead_ms = 50
set acro_trainer_debug_axis = ROLL
set acro_trainer_gain = 75
set p_pitch = 65
set i_pitch = 75
set d_pitch = 43
set f_pitch = 60
set p_roll = 40
set i_roll = 75
set d_roll = 43
set f_roll = 60
set p_yaw = 75
set i_yaw = 82
set d_yaw = 0
set f_yaw = 60
set angle_level_strength = 35
set horizon_level_strength = 50
set horizon_transition = 75
set level_limit = 90
set horizon_tilt_effect = 75
set horizon_tilt_expert_mode = OFF
set abs_control_gain = 0
set abs_control_limit = 90
set abs_control_error_limit = 20
set abs_control_cutoff = 11
set use_integrated_yaw = OFF
set integrated_yaw_relax = 200
set d_min_roll = 20
set d_min_pitch = 22
set d_min_yaw = 0
set d_min_boost_gain = 27
set d_min_advance = 20
set motor_output_limit = 100
set auto_profile_cell_count = 0
set launch_control_mode = NORMAL
set launch_trigger_allow_reset = ON
set launch_trigger_throttle_percent = 20
set launch_angle_limit = 0
set launch_control_gain = 40
# profile
profile 2
set dyn_lpf_dterm_min_hz = 150
set dyn_lpf_dterm_max_hz = 250
set dterm_lowpass_type = PT1
set dterm_lowpass_hz = 100
set dterm_lowpass2_type = PT1
set dterm_lowpass2_hz = 200
set dterm_notch_hz = 0
set dterm_notch_cutoff = 160
set vbat_pid_gain = OFF
set pid_at_min_throttle = ON
set anti_gravity_mode = SMOOTH
set anti_gravity_threshold = 250
set anti_gravity_gain = 5000
set feedforward_transition = 0
set acc_limit_yaw = 100
set acc_limit = 0
set crash_dthreshold = 50
set crash_gthreshold = 400
set crash_setpoint_threshold = 350
set crash_time = 500
set crash_delay = 0
set crash_recovery_angle = 10
set crash_recovery_rate = 100
set crash_limit_yaw = 200
set crash_recovery = OFF
set iterm_rotation = ON
set smart_feedforward = OFF
set iterm_relax = OFF
set iterm_relax_type = GYRO
set iterm_relax_cutoff = 11
set iterm_windup = 40
set iterm_limit = 150
set pidsum_limit = 500
set pidsum_limit_yaw = 400
set yaw_lowpass_hz = 0
set throttle_boost = 5
set throttle_boost_cutoff = 15
set acro_trainer_angle_limit = 20
set acro_trainer_lookahead_ms = 50
set acro_trainer_debug_axis = ROLL
set acro_trainer_gain = 75
set p_pitch = 50
set i_pitch = 50
set d_pitch = 27
set f_pitch = 60
set p_roll = 46
set i_roll = 45
set d_roll = 25
set f_roll = 60
set p_yaw = 65
set i_yaw = 45
set d_yaw = 0
set f_yaw = 60
set angle_level_strength = 50
set horizon_level_strength = 50
set horizon_transition = 75
set level_limit = 55
set horizon_tilt_effect = 75
set horizon_tilt_expert_mode = OFF
set abs_control_gain = 0
set abs_control_limit = 90
set abs_control_error_limit = 20
set abs_control_cutoff = 11
set use_integrated_yaw = OFF
set integrated_yaw_relax = 200
set d_min_roll = 20
set d_min_pitch = 22
set d_min_yaw = 0
set d_min_boost_gain = 27
set d_min_advance = 20
set motor_output_limit = 100
set auto_profile_cell_count = 0
set launch_control_mode = NORMAL
set launch_trigger_allow_reset = ON
set launch_trigger_throttle_percent = 20
set launch_angle_limit = 0
set launch_control_gain = 40
# restore original profile selection
profile 1
# rateprofile
rateprofile 0
set thr_mid = 50
set thr_expo = 0
set rates_type = BETAFLIGHT
set roll_rc_rate = 100
set pitch_rc_rate = 100
set yaw_rc_rate = 100
set roll_expo = 20
set pitch_expo = 20
set yaw_expo = 20
set roll_srate = 81
set pitch_srate = 81
set yaw_srate = 81
set tpa_rate = 30
set tpa_breakpoint = 1200
set tpa_mode = D
set throttle_limit_type = OFF
set throttle_limit_percent = 100
set roll_rate_limit = 1998
set pitch_rate_limit = 1998
set yaw_rate_limit = 1998
# rateprofile
rateprofile 1
set thr_mid = 50
set thr_expo = 0
set rates_type = BETAFLIGHT
set roll_rc_rate = 100
set pitch_rc_rate = 100
set yaw_rc_rate = 100
set roll_expo = 0
set pitch_expo = 0
set yaw_expo = 0
set roll_srate = 70
set pitch_srate = 70
set yaw_srate = 70
set tpa_rate = 10
set tpa_breakpoint = 1650
set tpa_mode = D
set throttle_limit_type = OFF
set throttle_limit_percent = 100
set roll_rate_limit = 1998
set pitch_rate_limit = 1998
set yaw_rate_limit = 1998
# rateprofile
rateprofile 2
set thr_mid = 50
set thr_expo = 0
set rates_type = BETAFLIGHT
set roll_rc_rate = 100
set pitch_rc_rate = 100
set yaw_rc_rate = 100
set roll_expo = 0
set pitch_expo = 0
set yaw_expo = 0
set roll_srate = 70
set pitch_srate = 70
set yaw_srate = 70
set tpa_rate = 10
set tpa_breakpoint = 1650
set tpa_mode = D
set throttle_limit_type = OFF
set throttle_limit_percent = 100
set roll_rate_limit = 1998
set pitch_rate_limit = 1998
set yaw_rate_limit = 1998
# rateprofile
rateprofile 3
set thr_mid = 50
set thr_expo = 0
set rates_type = BETAFLIGHT
set roll_rc_rate = 100
set pitch_rc_rate = 100
set yaw_rc_rate = 100
set roll_expo = 0
set pitch_expo = 0
set yaw_expo = 0
set roll_srate = 70
set pitch_srate = 70
set yaw_srate = 70
set tpa_rate = 10
set tpa_breakpoint = 1650
set tpa_mode = D
set throttle_limit_type = OFF
set throttle_limit_percent = 100
set roll_rate_limit = 1998
set pitch_rate_limit = 1998
set yaw_rate_limit = 1998
# rateprofile
rateprofile 4
set thr_mid = 50
set thr_expo = 0
set rates_type = BETAFLIGHT
set roll_rc_rate = 100
set pitch_rc_rate = 100
set yaw_rc_rate = 100
set roll_expo = 0
set pitch_expo = 0
set yaw_expo = 0
set roll_srate = 70
set pitch_srate = 70
set yaw_srate = 70
set tpa_rate = 10
set tpa_breakpoint = 1650
set tpa_mode = D
set throttle_limit_type = OFF
set throttle_limit_percent = 100
set roll_rate_limit = 1998
set pitch_rate_limit = 1998
set yaw_rate_limit = 1998
# rateprofile
rateprofile 5
set thr_mid = 50
set thr_expo = 0
set rates_type = BETAFLIGHT
set roll_rc_rate = 100
set pitch_rc_rate = 100
set yaw_rc_rate = 100
set roll_expo = 0
set pitch_expo = 0
set yaw_expo = 0
set roll_srate = 70
set pitch_srate = 70
set yaw_srate = 70
set tpa_rate = 10
set tpa_breakpoint = 1650
set tpa_mode = D
set throttle_limit_type = OFF
set throttle_limit_percent = 100
set roll_rate_limit = 1998
set pitch_rate_limit = 1998
set yaw_rate_limit = 1998
# restore original rateprofile selection
rateprofile 0
# save configuration
save
#
ありがとうございます。
めちゃくちゃ助かりました!!
プロポをバインドさせるため初期値を
バックアップせずにファームアップデートやっていたので
バックアップ大切ですね。