 ドロ沼くんの⌘マイクロドローンFPV入門
ドロ沼くんの⌘マイクロドローンFPV入門
目次
2020-01-13 水没即死 狂気の銭湯レースが開催される
東京オリンピックが開催される2020年。東京都荒川区にある銭湯、梅の湯にて湯船の上でドローンレースをするという常軌を逸したイベントが開催!
私も頭がトチ狂っているので、マスターコースの選手として出場させて頂きました笑

「水上のミス⇒機体水没⇒レース復帰不可」 という特殊すぎるレース環境に会場・選手ともに大盛りあがり!
- 大阪から備品資材を持ち込んで準備してくださった高田さんはじめとした運営メンバーの皆様
- 1日の売上がなくなるリスクを犯してまで会場提供してくれた梅の湯さん、
- レース盛り上げに欠かせないMADシステム開発者 MADさん & MCはっしーさん&えりんぬさん
- クラファンで支えてくださったスポンサーの皆様
たちのおかげで私自身存分に楽しむことができました!この場を借りて御礼申し上げます。(もし抜けてる方いたらスミマセンー!)
銭湯レースのリザルトデータを抽出してみた
私自身4度目のレースとなったのですが、次レースにつながる振り返りをするべく、マスターコース 全選手のリザルトタイムを練習から決勝ヒートまで一覧にしてみました。出典はWTWのYoutubeライブ映像からカタオカが目視で抽出しております(超大変だった・・・涙)
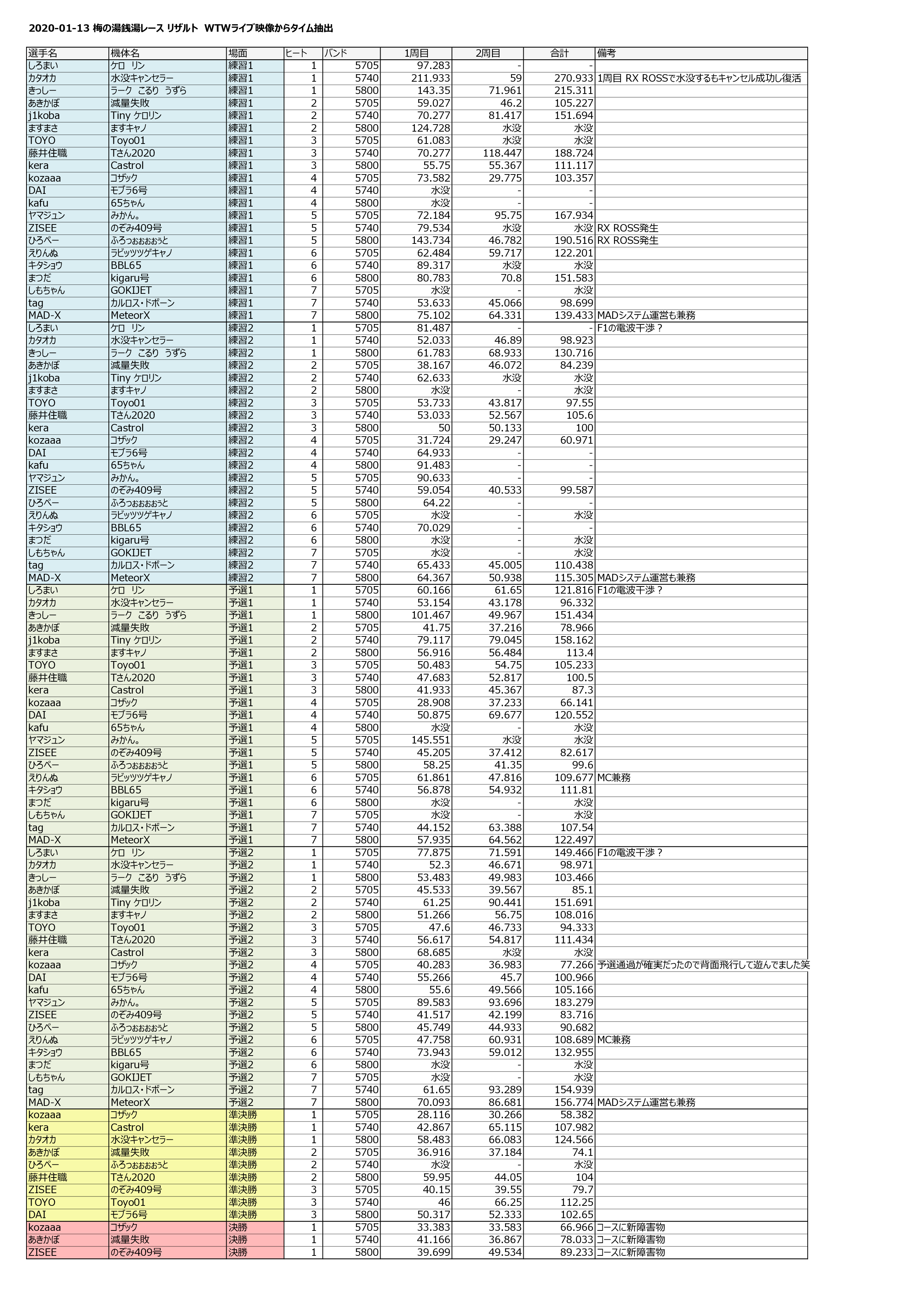
今回はこのリザルトデータを分析することで、マイクロドローンレースにおける有効な戦略を考えてみようと思います。
⇒PDF版はコチラ
狂気のコースを振り返る
まず今回のレースがどのようなコースだったか振り返ってみましょう。

コース図を観察するとチェックポイントは計23個!
内訳は下記の通り
・通常ゲート×14
・銭湯手すり×5
・フラッグ×3
・LEDトンネル×1
ものすごい数です。
さらに踏み込んで分析すると、23個のうち水際のものが8個!(構成比率34.8%)
チェックポイントが多いためミスが重なるとタイムがどんどん遅くなる上、1/3以上が水際なので水没一撃死の不安が常につきまといます。
マジ恐ろしいコース。誰ですか!考案したのは・・・w
レース規約を振り返る:2周合計タイム制
今回の銭湯レース、順位決定ロジックは下記の通り。
マスターコース2周タイム測定判定とする。
出典:facebook告知ページ
2ラウンドの内、早い方のタイムを採用
ここで注意したいのは1周の最速ラップではなく2周の合計タイム!
コース環境も鑑みると、早く飛ばすことよりも安定的にミスらず飛ばすことの方が重要度が高かったといえます。
リザルトタイムを様々な切り口で分析してみた
レース前提条件を確認したら具体的にリザルトタイムを深堀りしてみましょう!
最速ラップ順に並べてみた
まず1周単位の最速ラップを選手・レース別に抽出してみました。
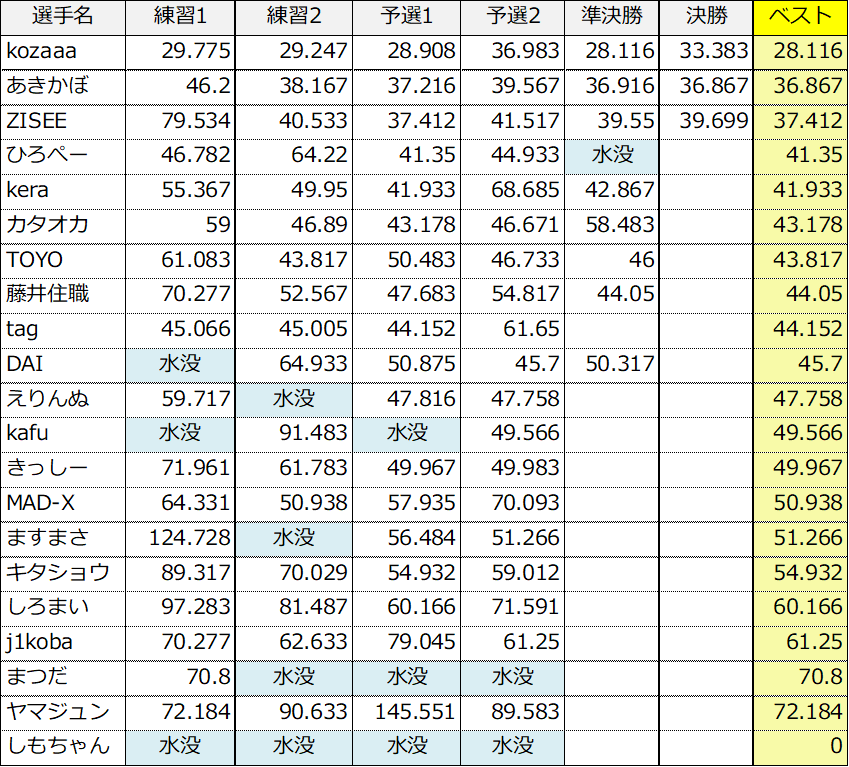
最速ラップの順番と準決勝進出者はほぼ一致している事がわかります。
ちなみにタイム数の分布は下記の通り。40秒台に集中していることからここが分岐点になりました。しかしこうやって見える化するとkozaaa選手の圧倒的速さが際立ちますね・・・

1周目と2周目の平均タイム(予選のみ)
次に全選手の1周目と2周目の平均タイムを算出してみました。(データは予選1・2から算出)
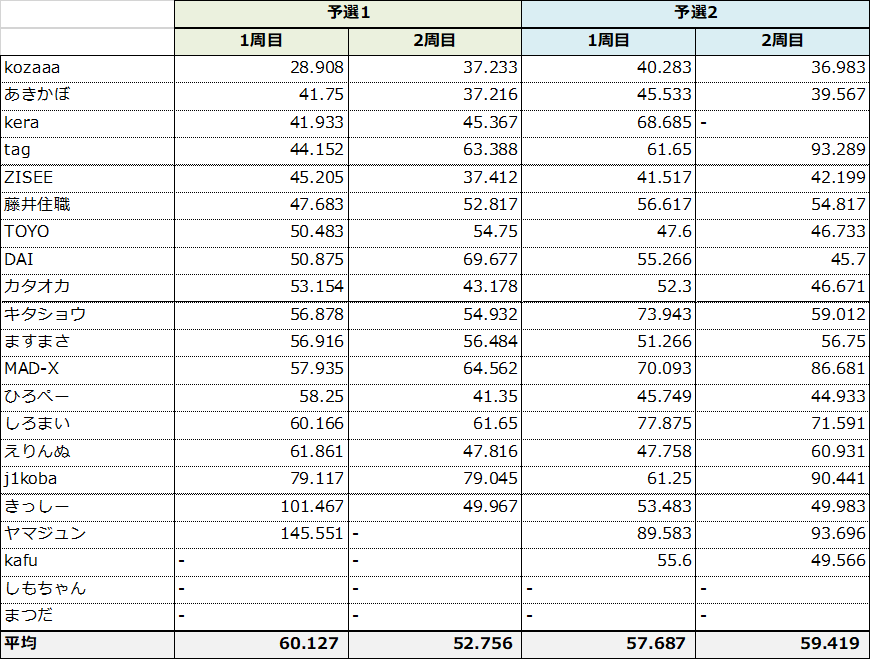
飛行回数を重ねコースに慣れることでタイムがどんどん上がっていくのかと思いきや、データをみると
- 一番慣れてきた 予選2回目-2周目が59.419秒と 2番目に低い値
- 予選1回目-2周目が52.756秒と一番早い値
と意外な結果になりました。
予選2回目-2週目は見方を変えるともう後がない最後の周回。
プレッシャーがかかり焦った結果、ミスが多発しタイムが悪くなった?
逆に予選1回目-2周目は、まだ予選1回ある心の余裕からか、リラックスしてミスなく飛行できた人が多かったと思われます。
水没率の推移
レース場面ごとに水没率がどのように変化していったのかグラフにまとめたものが下記です。
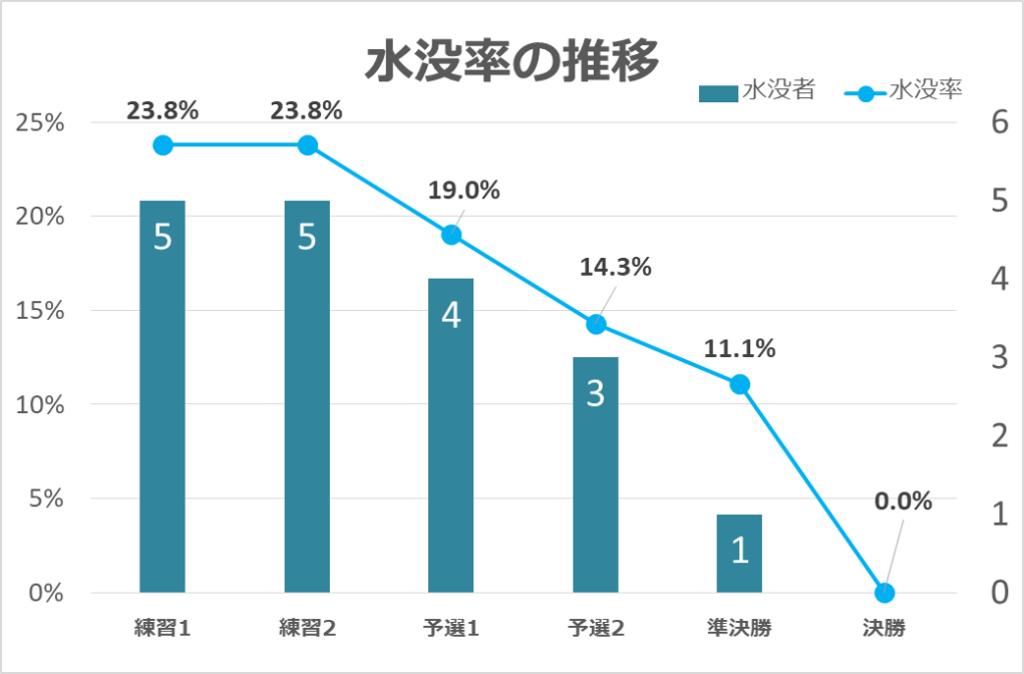
飛行回数を重ねるにつれて水没者数は減少しますが、それでも水没率は10~20%前後と油断ならない値を維持しています。
銭湯レース出場にあたってはスペア機必須ですね!
上位3選手の全リザルトを研究する
3位:ZISSE選手の場合

毎度様々なレースで表彰台に立っているZISEEさんのリザルトはコチラ。

実は練習1回目でRX-ROSSが頻発するという不具合が発生。どうも銭湯の入り組んだコンクリート壁がプロポ電波を反射しまくりコントロールが乱れてしまったようです。そして2周目水没・・・!
ちなみにZISEE選手の送信機プロトコルはFrsky。同様の現象がひろべー選手にも発生していました。
しかしながら練習2回目以降、操縦場所を変えることで上記問題を解決。その後は順調にタイムを上げていき決勝に進出しています。
レース当日でないと分からない突発的トラブルへの柔軟な対応力がすごかった!
私ならテンパったままレースを終えそうです・・・
2位:あきかぼ選手の場合

ZISEE選手同様、様々なレースの表彰台常連あきかぼ選手のリザルトはコチラ。

特徴的なのはタイムの安定感。大崩れがなくレースを重ねるたびに尻上がりにタイムを縮めています。
ミスったら致命傷になりそうなポイントは慎重に飛び、そうでない場所は攻めるなどコース特性を見極めて飛んでいる印象。
私は目先のチェックポイントを安全に飛ばすことで精一杯でした・・・!
決勝のDVRをUPされていたので共有させていただきます。やらかしても崩れない・・・!
1位:kozaa選手の場合
ご存知いろんなレース大会を荒らしまくってるスーパー中学生kozaaa選手のリザルトはコチラ。
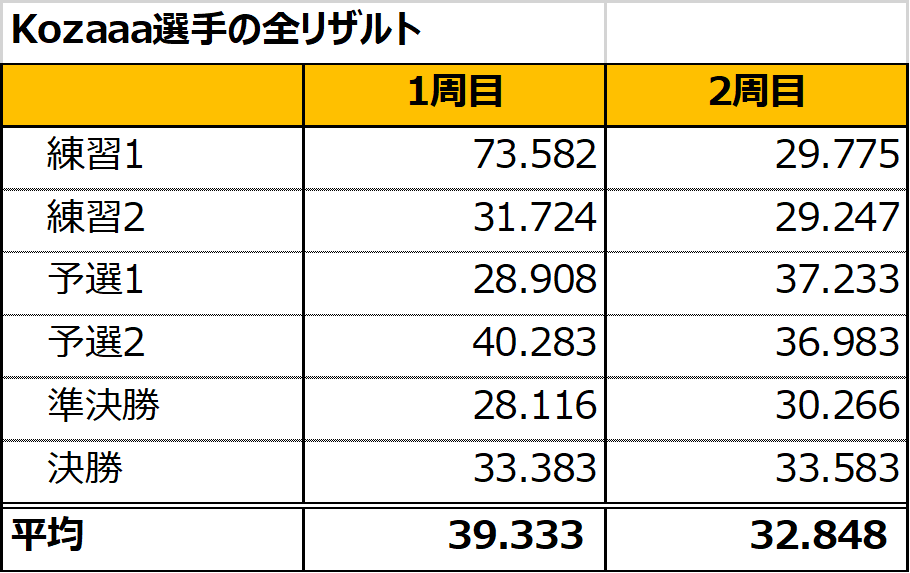
驚くべきは、練習1回目で20秒台を叩き出しているということ・・・!
初見なのにどうなってんの!?
本人に聞くと
・コース図見れば頭の中でシミュレートできる
・ イメージで飛ばしてる
との事。もはや次元が違う・・・・!
ちなみに決勝レースではコース上にワゴンが出現するサプライズがあったようですが、kozaaa選手は突然の不確定要素に対しても即座に対応できた模様・・・(あなたニュータイプなの?)
また、kozaaa選手がレース後速くなるコツを動画にまとめていたので共有しておします・・・!
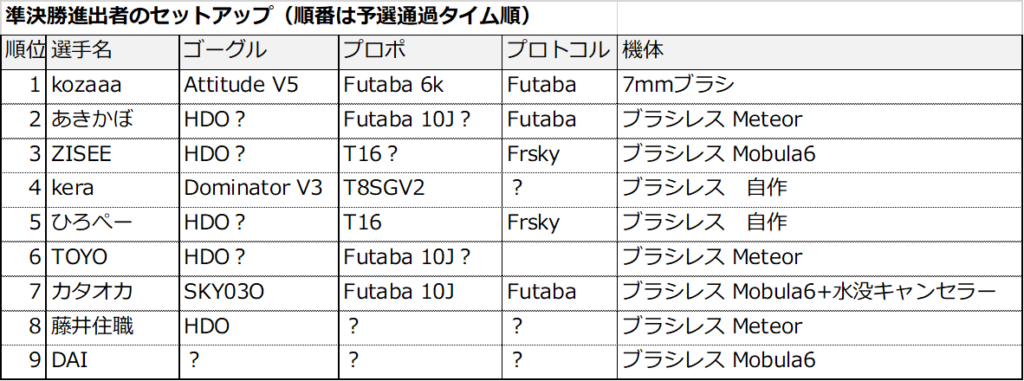
準決勝進出者のセットアップを分析する
さて気になるのが選手たちが使っていたマイクロドローンセットアップ。
一部情報が不確かですが、準決勝進出者にしぼり一覧にしてみました。
①FPVゴーグルは2眼式で一定水準あればOK
FPVゴーグルはHDO率高いですが、TOPのkozaaa選手はエントリーモデルのAttitude V5。高価なゴーグルでなくてもレースで勝てることを証明してくれています。
また4位通過のケラさんに至っては2016年に発売されたやや古いモデル Dominator V3。
これらを鑑みると、FPVゴーグルの性能は一定水準以上あれば問題なさそうです。
私が愛用するコスパ抜群のハイエンドFPVゴーグルSKY03Oはまだ関東ではマイノリティの模様。
もっと結果を出してSkyzoneの使いやすさ布教してぇぇー!
ちなみにレギュラーコースを優勝されたhako選手はskyzoneです!
②プロポは意外とFutabaも多い
T8SGやT16 といったマルチプロトコルが多いと思いきや、意外とFutaba率も高め。私もFrskyのX-liteと併用するなどいろいろ試しましたが、結局Futabaの10Jに落ちつきました。
そして優勝したKozaaa選手はまたしてもエントリーモデルのFutaba 6K。
プロポもFPVゴーグル同様、一定水準以上あれば問題ないようです。
③機体はほとんどブラシレス(Kozaaa除く)
昨年からブラシレスOKのレースが増えていますが、準決勝進出者はほぼ全員がブラシレス機。今回のコースは大きな高低差があったのでパワーの強いブラシレスが有利に働いたと考えられます。
機体内訳は先に発売されたBETAFPVのMeteorが一番多く、ついでMobula6といった感じ。この2機種が2020年レース機の定番になっていきそうですね。

ただし例外が!
優勝したKozaa選手は唯一のブラシ機。通常の6mmモーターよりパワーある7mmモーターを採用した自作機です。
本人にその理由を聞くと、
「ブラシモーターの方が動きが素直だから。」
若いのに玄人志向!
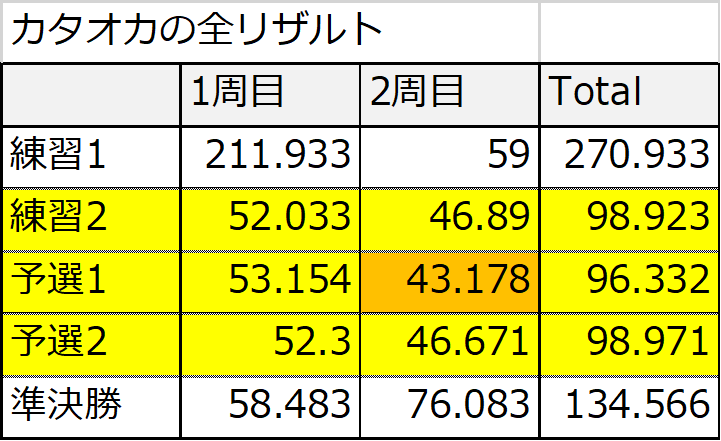
カタオカのレース戦略と振り返り
本格的なFPV歴が約1年、メンタルが豆腐な私ですが、予選を勝ち抜きたかったので入念に戦略を組んで臨みました。
あまり参考にならないかもしれませんが備忘録で残しておきます。
①絶対水没しない機体を作った
前回の銭湯レース動画をみると水没者がかなり多く、常にプレッシャーを感じながら飛ばしている操縦状況。豆腐メンタルな私にとってなんというハードコンディション。
そこで以前から災害救助用途のフロート付き機体を研究していたこともあり、年末年始のまとまった時間を使って飛行性能を損なわず絶対水没しない1セル65レーシングドローン(水没キャンセラー)を開発!(軽量なMobula6をベース)
風呂場で20回以上水没実験を繰り返していたので、レース当日は全く沈む気がしませんでした。
⇒水上発進の様子
結果他選手よりもメンタル面で余裕を持ったレース運びをすることができ、タイムにも好影響。
水没キャンセラーの設計思想・作り方についてはまた別途記事にしたいと思います。
②ミスなく飛ばすことを心がけた
冒頭でも書いたように
- 23個もあるチェックポイント
- 水没リスク有り
- 2周合計タイムで判定
というレースレギュレーションから、ミスなく飛ばしたほうがタイム上がると確信。
1回のミスると2秒前後のロス。
これが地味に積み上がると大きなタイム差が生まれます。
しかし予選通過後の準決勝ではkozaa選手を出し抜こうと入れ込みすぎた結果、序盤でミスりまくり予選より悪化。モタモタしているうちにkozaaa選手に周回遅れを喰らってしまいました涙。
まだまだ修行が必要です・・・
③本番コースに近しい環境で練習した
できるだけ事前にコースに慣れたほうがよいと考え、要素を反映した模擬コースを構築。前日練習しまくりました。
借りた場所は銭湯の広さに全然足りず、完全再現できませんでしたが、それでも操縦イメージをつかむ上でかなり役立ちました。
まとめ
以上データという切り口でレースを振り返ってみましたが私なりにまとめると下記の通り。
メンタル面
- 練習時点でトラブル要素はすべて解消させておく
- 追い込まれる状況を作らない(例:予選1回目からタイム残す・水没しない機体を作る・スペア機を用意)
- 早く飛ばすことよりミスしないことが重要
- 似たコースでの事前練習が有効
装備面
- 機体性能がタイムに一番影響を与える
- ゴーグル・プロポは一定水準以上あればOK
グフフフ・・・
機体への投資は惜しんじゃだめドロ・・・
今日の一句
”メンタルを 乱さぬ準備で ほぼ決まる”

コメントを残す